Share
Pin
Tweet
Send
Share
Send
이 장치는 저렴한 TQFP32 패키지의 저렴한 ATMEGA 8 L 마이크로 컨트롤러와 오래된 컴퓨터 하드 드라이브에서 제거 할 수있는 컴퓨터 하드 드라이브 (HDD)의 엔진을 기반으로 조립됩니다. 회로에는 최소 개수의 부품이 포함되어 있으며 임의의 기능을 보완 할 수 있습니다. 표준 크기 18650, 전압 3.7 볼트의 Li- 이온 배터리 2 개를 직렬로 연결하여 구동합니다.
급수는 24 시간마다 고정 부분으로 수행됩니다.
유일한 버튼은 작업 테스트이며, 버튼을 누른 후 후속 급수는 정확히 동시에 1 초의 정확도로 수행됩니다. (나는 휴가 중에 설정하지 않고 단순히 포함 시켰으므로 불필요한 지시없이 선물 옵션으로 제공 할 수 있습니다).
디자인 특징 :
- 몇 개월 동안 배터리 작동 (저전력 소비);
- 매우 정확한 관개 용량 및 관개 사이의 정확한 간격;
- 세부 사항 및 가용성에 대한 회로의 중요하지 않음;
- 모터에서 움직이는 부품이 부족하여 결과적으로 물에서 작업 할 때의 내구성과 신뢰성;
- 엔진 작동 중 매우 낮은 소음;
- 소리와 빛의 반주에 대한 설정 (하루에 한 번 물을주기)이 필요하지 않습니다.
- 충전 필요성에 대한 경고음과 함께 배터리의 심방 전 방지;
- 밤에는 표시등이 자동으로 꺼집니다.
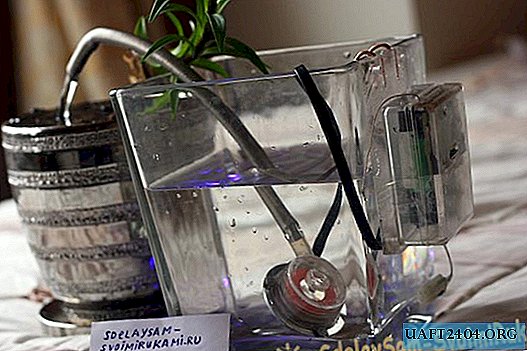
디자인은 관개 튜브가있는 꽃병에 담긴 펌프 (펌프)와 물과 동일한 꽃병에 장착 된 소형 전자 상자입니다.
우선, 펌프 제작을 시작하겠습니다.
우리는 CD, 1.5 리터의 우유 (너비 넓은 목, 내경 33mm)의 플라스틱 병, 슈퍼 접착제, 4 개의 전선 (iPhone 충전으로 손상된 전선을 가져갔습니다), 3 개의 나사, 와셔 및 3 개의 너트가 필요합니다 그리고 유연한 튜브 조각.
병에서 "스커트"의 가장자리를 따라 금속 용 쇠톱으로 목을 잘라 내고 결과 섹션을 사포, 파일 또는 바에 맞 춥니 다.

이러한 방식으로 우리는 소위 펌프의 작동 챔버를 준비합니다.

다음으로 CD 디스크가 필요합니다. 내부 구멍은 모터와 정확히 같은 크기이며 디스크에서 임펠러를 만듭니다.
디스크는 가위로 잘 자르고, 뜨거운 물로 약간 예열하여 잘게 자르는 부분이 갈라지지 않도록하는 것이 좋습니다.
우리는 병에서 절단 된 부분-작업 챔버를 가져 와서 스크류 캡이있는 부분이있는 디스크의 중앙에 정확하게 적용합니다. 마커로 원을 표시하고 보통 가위로 자릅니다. 결과 디스크는 완벽하게 매끄럽지 않지만 사포를 수정할 수 있습니다. 가장 중요한 것은 최소 간격을 가진 디스크가 작업 챔버 안에 들어갈 수 있다는 것입니다.
그것은 미래의 임펠러의 반지로 밝혀졌습니다.

이제 "프로펠러"용 블레이드를 만들어야합니다. 이렇게하려면 디스크의 절반이 필요합니다. 우리는 7mm 너비의 스트립으로 마커를 그리고 가위로 잘라냅니다.

스킨과 레벨.

다음으로 13mm의 6 개의 동일한 부분으로 자르고 양쪽에 플라이어로 구부립니다.

추가 절차에는 최대 정확도가 필요합니다. 같은 거리에 슈퍼 접착제로 블레이드를 한 번에 하나씩 접착해야합니다.
블레이드는 챔버 구멍으로 물을 긁지 않고 중앙에서 가장자리의 구멍으로 캐스트하는 것처럼 구부러져 있습니다. 모터는 반 시계 방향으로 만 회전합니다. 물방울로 약간 고정하고 핀셋과 정렬하고 약간 건조시킨 후에 누락 된 부분에 접착제를 추가 할 수 있습니다.

두 번째 접착제의 유독 가스를 피하십시오. 그런 다음 건조하고 니스 칠할 수 있습니다. 내 손끝에는 매니큐어 만 있었고, 그것은 내구성이 뛰어납니다.
그런 다음 유연한 호스 조각이 필요합니다. 예를 들어 건축 유체 수준에서 조각을 가져 왔습니다.
목의 나사 표면에 매끄러운 구멍을 뚫는 것은 그렇게 간단하지 않습니다. 먼저 두 병을 연습해야 했으므로 납땜 인두로 부드럽게 녹여서 내부에서 부드럽게 청소하여 날이 불규칙하지 않도록 내부에서 부드럽게 청소했습니다.
우리는 목의 개구부에 약간의 각도로 호스 컷을 삽입하고 순간 유형의 투명 접착제로 고정합니다. 튜브 및 챔버 개구부는 약 8mm의 충분한 직경을 가져야합니다. 튜브를 하우징에 직각으로 삽입하지 말고 흐름이 시계 반대 방향으로 회전한다는 사실을 고려하여 튜브를 삽입하는 것이 좋습니다.


튜브를 고정하려면 슈퍼 접착제를 사용하지 않는 것이 좋습니다. 건조되면 플라스틱 표면이 손상되고 케이스가 흐려져 투명성이 떨어집니다. 여기, 헬륨베이스의 투명한 실런트 또는 접착제 경찰이 훌륭합니다.
이제 카메라를 모터에 장착하고 내부 블레이드의 자유로운 회전을 보장하기 위해 중앙에 나사를 고정하고 투명한 실런트로 슬롯을 밀봉하고 14mm 중간의 구멍으로 투명 커버를 접착하여 펌프를 조립해야합니다.
임펠러가 시계 반대 방향으로 엄격하게 회전한다는 것을 상기시켜 드리겠습니다. 이것이 중요합니다. 다음으로, 4 선 와이어를 모터에 납땜하고 땜납을 니스 칠하고 파란색 SMD LED를 권선 중 하나에 (1 kΩ 저항을 통해) 공통 양극에 납땜하십시오. 이제 직장에서 물 속에서 깜박입니다.
하드 드라이브의 엔진에 대한 몇 마디.
손으로 로터를 돌릴 때 그러한 모터의 일부 유형은 다른 쪽보다 슬라이딩이 잘되어 한 방향으로 눈에 띄게 계속 회전합니다. 즉, 시계 방향으로 회전하려고하면 로터가 거의 즉시 정지합니다. 이러한 장치는 다른 베어링 설계를 가지고 있으며 이러한 엔진은 아마도 우리의 목적에 더 적합 할 것입니다. 나는 물에서 오랫동안 두 가지 유형의 일을하고 잘 살고 있지만.
권선은 이와 같이 점검됩니다. 모터에는 4 개의 접점이 있어야합니다. 중간 점 인 극단적 인 접점 중 하나를 찾아야합니다. 이 출력은 전원 플러스에 연결되고 나머지는 순서대로 첫 번째, 두 번째, 세 번째로 mosfets에 연결됩니다. 테스터는 모든 인접한 접점 사이의 저항을 측정합니다. 저항이 적 으면 극도의 접점 중 하나가 표시됩니다.
이것은 일반적이며 긍정적 인 버스에 있습니다. 모터 하우징에 와이어를 고정하는 것이 매우 바람직합니다.이를 위해 몇 밀리미터 구멍을 뚫고 구리 브래킷으로이 케이블을 누를 수 있습니다. 펌프가 준비되면 구부러진 호스가 8mm 이상의 내경으로 노즐에 놓입니다. 20cm 길이로 물을 줄 것입니다. 이제 인쇄 회로 기판을 만들고 장치를 납땜 할 수 있습니다.
보드는 LUT 방법으로 한쪽면 유리 섬유로 만들어져 있습니다.
설치 중에 쉽게 확인할 수 있도록 트레이스 그림과 인쇄 회로 기판의 레이아웃이 반영되지 않았다는 사실에주의를 기울입니다. LUT를 인쇄 할 때는 미러를 회전 시키거나 아카이브에서 SprintLayout 파일을 사용해야합니다.

이 방법으로 보드를 매니큐어로 칠할 수도 있습니다.
볼펜의 막대가 가열됩니다 (약간 약간!) 라이터의 불꽃 위에서 고르게 회전하고 균등하게 당기십시오. 다음으로 얇은 끝 부분을 날로 자릅니다. 따라서, 출구가 매우 작은 원뿔형 튜브가 얻어진다. 그것은 1.5 입방 cm의 부피로 주사기 내부에 삽입 될 수 있으며, 이전에 규칙적인 매니큐어를 입력 한 후 인쇄 도체의 트랙을 회로 보드에 그립니다.
건조 후 보드를 산세 용액으로 내립니다. 황산구리와 1 : 3 염의 혼합물 및 물일 수있다. 용액은 가능한 농축 된 상태로 준비되며, 예를 들어 양초 불꽃 위에서 가열이 필요하다. 일정한 교반으로 공정이 가속화됩니다. 블루 비 트리 올은 모든 농업 상점에서 판매됩니다.

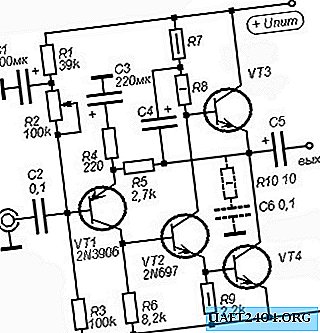
마이크로 컨트롤러는 D1, R7, Q1 요소에 조립 된 파라 메트릭 전압 안정기에 의해 구동됩니다.
저항 값은 스태빌라이저 자체 소비가 가능한 한 낮도록 선택됩니다. 소위 "Krenki"보다 훨씬 낮습니다.
이러한 회로도 솔루션은 소비를 0.3mA로 줄였습니다.
배터리를 재충전하지 않고 디자인을 작동하는 기간은 이것에 달려 있기 때문에 이것은 매우 중요합니다.
트랜지스터 Q1-npn은 중요하지 않습니다.
제너 다이오드 안정화 전압 5.1 V. 모바일 충전이 가능합니다. 석영 공진기-32.768 kHz. 일반 시계 쿼츠. 쿼츠 시계. 회로의 키로는 구형 컴퓨터의 시스템 보드에서 납땜 된 MOSFET이 사용됩니다. SMD LED. LED 스트립 캔.
스피커-적절한 크기 휴대폰에서 스피커를 사용할 수 있습니다.
회로의 설치는 전압 안정기로 시작한 다음 출력 (커패시터 C2 및 C3)에서 전압을 측정해야합니다. 5 볼트 여야합니다. 그런 다음 마이크로 컨트롤러 및 기타 모든 것을 납땜 할 수 있습니다.
회로에서, 마이크로 컨트롤러 PB0, PB1, PD6 포트의 미사용 및 이혼 핀을 사용하여 주변 장치를 연결할 수 있습니다.
마이크로 컨트롤러 프로그램 알고리즘은 다음과 같이 구성됩니다.
컨트롤러가 비동기 모드에서 작동하도록 구성되었습니다. 1 초에 한 번씩 중단이 발생하며이 시점에서 프로그램은 시간을 계산하고 LED (10 초마다)로 짧은 시간 동안 깜박 인 다음 즉시 절전 모드로 전환하여 전력 소비를 절약합니다. 시간 카운터가 0이되면 (버튼으로 재설정 한 직후 또는 24 시간 후에) 컨트롤러의 전원 공급 장치가 4 번 측정되고 내부 전압 기준 소스와 비교됩니다. 전압이 허용 가능한 전압보다 낮 으면 회로는 배터리 부족을 알리는주기적인 사운드 신호를 내고 15 개의 신호 후에 컨트롤러는 전원 차단 모드로 설정되고 다음 번 배터리 충전 시까 지 절전 모드로 전환됩니다.
전압이 임계 값을 초과하면 사운드 신호가 트리거되고 LED가 켜집니다. 다음으로, 모터 로터의 초기 위치가 설정되고 모터 펄스에 단기간 펄스가 순차적으로인가된다. 펄스의 지속 시간과 그 연속 사이의 일시 정지가 점차 감소되어 모터의 회전 세트와 블레이드의 지속적인 회전이 발생하여 정확한 급수 부분을 제공합니다. LED가 동 기적으로 깜박입니다.
관개가 끝나면 회로는 시간을 계산하기 위해 다시 대기 모드로 들어갑니다. 이 모드에서는 대부분의 시간에 위치하므로 높은 에너지 소비 효율 (약 0.3mA)을 보장합니다.
메인 프로그램 동안 컨트롤러는 주파수가 8 MHz 인 내부 발진기에서 클럭되며 슬립 모드에서는 외부 클럭 쿼츠를 사용하여 시간을 정확하게 계산할 수 있습니다.
10 초마다 LED가 짧게 깜박이면 장치 작동을 나타냅니다. 0 초가 시작될 때부터 30 분 동안 깜박 인 다음 12 시간 동안 깜박 인 후 12 시간 후에 다시 시작됩니다. 따라서 물을 00 시로 설정하면 밤에는 깜박임이 발생하지 않지만 오후에는 12 시만 깜박입니다.
펌웨어 파일 Dviglo_mega_avr_V.hex
펌웨어를 플래싱 할 때는 VR Studio 프로그램 파일 Dviglo_mega_avr_V.rar에서 8 MHz MHz 오실레이터 용 VR Studio 프로그램의 소스 코드를 구성해야합니다.
Arduino 보드가 있으면 프로그래머가 필요하지 않습니다. (자세한 지침)
proshivka_arduinoi 폴더의 파일
펌웨어를 플래싱 할 때는 VR Studio 프로그램 파일 Dviglo_mega_avr_V.rar에서 8 MHz MHz 오실레이터 용 VR Studio 프로그램의 소스 코드를 구성해야합니다.
Arduino 보드가 있으면 프로그래머가 필요하지 않습니다. (자세한 지침)
proshivka_arduinoi 폴더의 파일
기사의 자료와 함께 보관하십시오. 등록 된 사용자 만 다운로드 할 수 있습니다.
주의! 숨겨진 텍스트를 볼 수있는 권한이 없습니다.

비디오 장치 작동 :
Share
Pin
Tweet
Send
Share
Send